Multitasking
This document describes features specific for upcoming 0.6 Release
In Dotrix rest of the application logic should be implemented in
tasks. Developer must implement the Task trait for some data
structure.
struct MyTask {
counter: u64,
}
impl dotrix::Task for MyTask {
type Context = ();
type Provides = ();
fn run(&mut self, ctx: Self::Context) -> Self::Provides {
// Logic goes here
self.counter += 1;
}
}
Each task can be dependent on some context and can provide some data, that can be used by other tasks.
Context
Each task may access shared context using so called Selectors.
Context of a task may be built using different combinations of
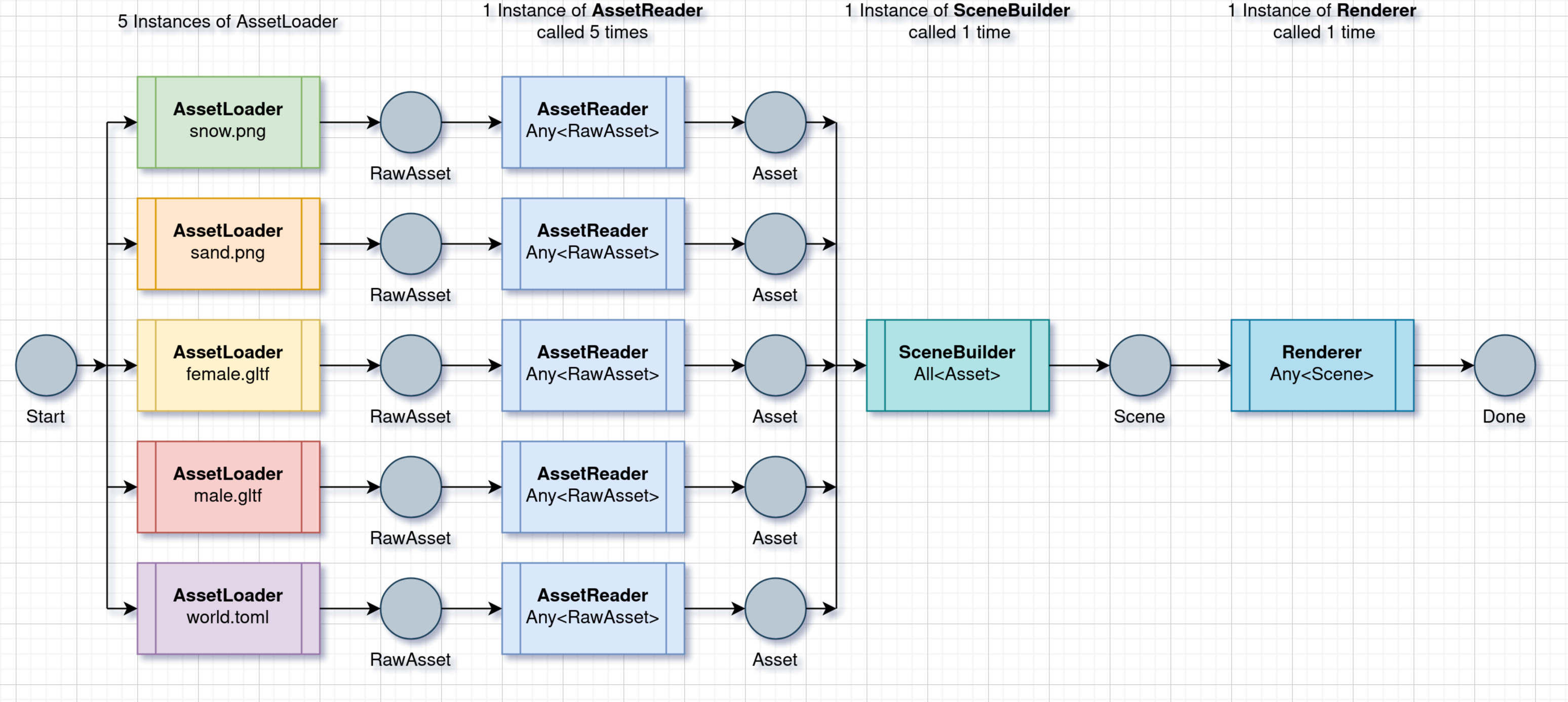
selectors. The order of selectors does not matter. Using selectors
you can build complex and effective execution graphs like one bellow.
Services selectors
-
Ro<T>- Read only selector for a service of typeT -
Rw<T>- Read and write selector for a service of typeT
As soon as services are just a shared data instances with some
associated methods, these selectors only provide access to the data.
The only role they play for task scheduling is declaration of
possibility to run in parallel. For example, two or more tasks
using Ro<Camera> in their context can run in parallel, but only
one task dependent on Rw<Camera> can run at a time.
The selectors implement Deref and DerefMut traits appropriately,
so you can access methods and properties defined for enclosured T
service on a selector itself.
impl dotrix::Task for MyTask {
type Context = (
Ro<Camera>,
);
type Provides = ();
fn run(&mut self, (camera,): Self::Context) -> Self::Provides {
println!("ProjView matrix: {:?}", camera.proj_view());
}
}
Dependencies selectors
-
Any<T>- Read only selector for data of typeTprovided by other tasks -
All<T>- Read only selector for all instances of typeTprovided by other tasks
Both selectors provides read only access to data provided by previously executed tasks, but they have important difference in how they affect scheduling.
A task with dependency on Any<Data> will be executed on each
provision of Data. While All<Data> will wait until all
provisions of Data are available. Selector All<T> does not
implement Deref trait. Instead of this, it provides .iter()
method returning an iterator over the data instances.
impl dotrix::Task for MyTask {
type Context = (
Ro<Camera>,
All<Asset>,
);
type Provides = MyScene;
fn run(&mut self, (camera, assets): Self::Context) -> Self::Provides {
println!("collected {} assets", assets.count());
let mut my_scene = MyScene::new();
for asset in assets.iter() {
my_scene.add(asset);
}
my_scene
}
}
State selectors
-
State<Ro<T>>- Read only selector for state of typeT -
State<Rw<T>>- Read and write selector for state of typeT
State selectors provides access to application state data. While
they affect scheduling in the same way as Ro<T> and Rw<T>,
they also stick execution of a task to the selected state.
impl dotrix::Task for MyTask {
type Context = (
dotrix::State<dotrix::Ro<MyState>>,
);
type Provides = ();
fn run(&mut self, (state,): Self::Context) -> Self::Provides {
println!("I run at MyState");
}
}
Both state selectors also provide access to states stack control
methods. If you need to access these methods for a task, that should
run on any state, you can use () as a state data, which means
"Any State", for example State<Ro<()>>.






